

Top
Author
Updated
16 Dec 2024Form Number
LP0578PDF size
10 pages, 530 KBSubscribed to LP0578.
Thank you for your feedback.
Abstract
Using a Redundant Array of Independent Disks (RAID) to store data remains one of the most common and cost-efficient methods to increase server's storage performance, availability, and capacity. RAID increases performance by allowing multiple drives to process I/O requests simultaneously. RAID can also prevent data loss in case of a drive failure by reconstructing (or rebuilding) the missing data from the failed drive using the data from the remaining drives.
This guide describes the RAID technology and its capabilities, compares various RAID levels, introduces Lenovo RAID controllers, and provides RAID selection guidance for ThinkSystem, ThinkServer, and System x servers.
Change History
Changes in the December 16, 2024 update:
- Added RAID 1 Triple and RAID 10 Triple - RAID levels section
Introduction
Using a Redundant Array of Independent Disks (RAID) to store data remains one of the most common and cost-efficient methods to increase server's storage performance, availability, and capacity. RAID increases performance by allowing multiple drives to process I/O requests simultaneously. RAID can also prevent data loss in case of a drive failure by reconstructing (or rebuilding) the missing data from the failed drive using the data from the remaining drives.
This guide describes the RAID technology and its capabilities, compares various RAID levels, introduces Lenovo RAID controllers, and provides RAID selection guidance for ThinkSystem, ThinkServer, and System x servers.
Introduction to RAID
RAID array (also known as RAID drive group) is a group of multiple physical drives that uses a certain common method to distribute data across the drives. A virtual drive (also known as virtual disk or logical drive) is a partition in the drive group that is made up of contiguous data segments on the drives. Virtual drive is presented up to the host operating system as a physical disk that can be partitioned to create OS logical drives or volumes.
This concept is illustrated in the following figure.
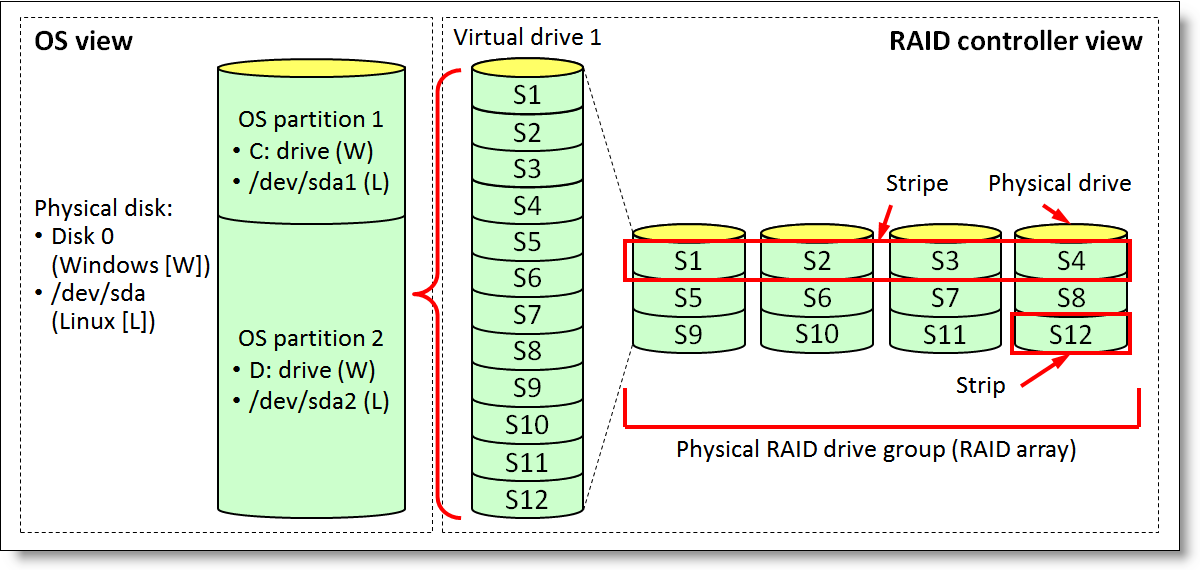
Figure 1. RAID overview
The data in a RAID drive group is distributed by segments or strips. A segment or strip (also known as a stripe unit) is the portion of data that is written to one drive immediately before the write operation continues on the next drive. When the last drive in the array is reached, the write operation continues on the first drive in the block that is adjacent to the previous stripe unit written to this drive, and so on.
The group of strips that is subsequently written to all drives in the array (from the first drive to the last) before the write operation continues on the first drive is called a stripe, and the process of distributing data is called striping. A strip is a minimal element that can be read from or written to the RAID drive group, and strips contain data or recovery information.
The particular method of distributing data across drives in a drive group is known as the RAID level. The RAID level defines a level of fault tolerance, performance, and effective storage capacity because achieving redundancy always lessens disk space that is reserved for storing recovery information.
Recommendation: It is always recommended to combine into a single RAID drive group the drives of the same type, rotational speed, and size.
RAID levels
There are basic RAID levels (0, 1, 5, and 6) and spanned RAID levels (10, 50, and 60). Spanned RAID arrays combine two or more basic RAID arrays to provide higher performance, capacity, and availability by overcoming the limitation of the maximum number of drives per array that is supported by a particular RAID controller.
RAID 0
RAID 0 distributes data across all drives in the drive group, as shown in the following figure. RAID 0 is often called striping.
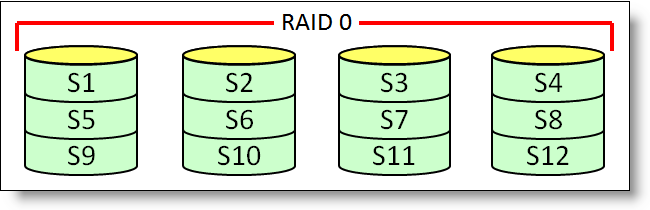
Figure 2. RAID 0
RAID 0 provides the best performance and capacity across all RAID levels, however, it does not offer any fault tolerance, and a drive failure causes data loss of the entire volume. The total capacity of a RAID 0 array is equal to the size of the smallest drive multiplied by the number of drives. RAID 0 requires at least two drives.
RAID 1
RAID 1 consists of two drives, and data are written to both drives simultaneously, as shown in the following figure. RAID 1 is also known as mirroring.
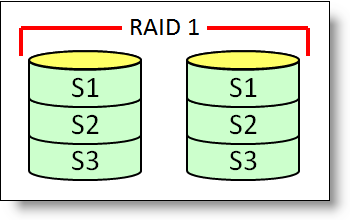
Figure 3. RAID 1
RAID 1 provides very good performance for both read and write operations, and it also offers fault tolerance. In case of a drive failure, the remaining drive will have a copy of the data from the failed drive, so data will not be lost. RAID 1 also offers fast rebuild time. However, the effective storage capacity is a half of total capacity of all drives in a RAID 1 array. The capacity of a RAID 1 array is equal to the size of the smallest drive.
RAID 5
RAID 5 distributes data and parity across all drives in the drive group, as shown in the following figure. RAID 5 is also called striping with distributed parity.
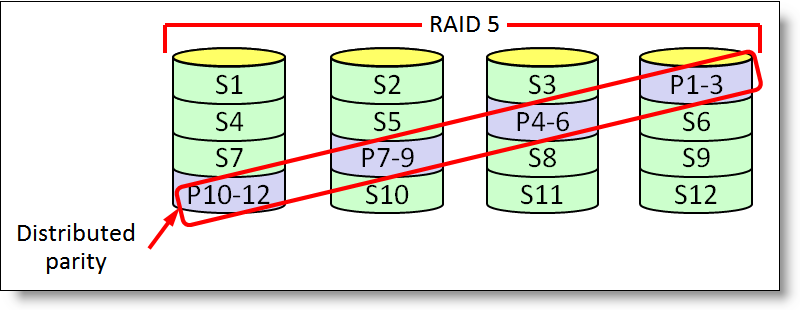
Figure 4. RAID 5
RAID 5 offers fault tolerance against a single drive failure with the smallest reduction in total storage capacity; however, it has slow rebuild time. RAID 5 provides excellent read performance similar to RAID 0, however, write performance is satisfactory due to the overhead of updating parity for each write operation. In addition, read performance can also suffer when the volume is in degraded mode, that is, in case of a drive failure.
The capacity of a RAID 5 array is equal to the size of the smallest drive multiplied by the number of drives less the capacity of the smallest drive. RAID 5 requires minimum three drives.
RAID 6
RAID 6 is similar to RAID 5, except that RAID 6 writes two parity segments for each stripe, as shown in the following figure, enabling a volume to sustain up to two simultaneous drive failures. RAID 6 is also known as striping with dual distributed parity.
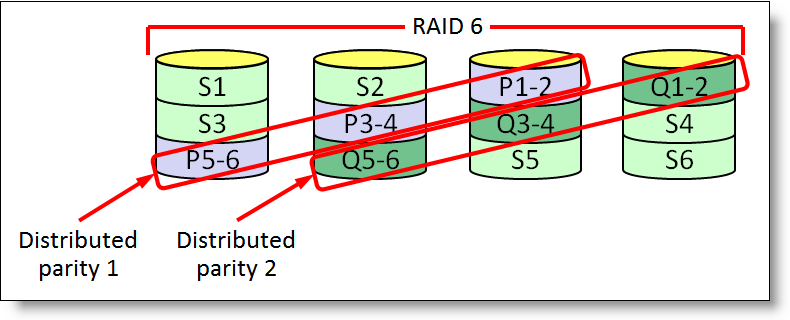
Figure 5. RAID 6
RAID 6 offers the highest level of fault tolerance, and it provides excellent read performance similar to RAID 0, however, write performance is satisfactory (and slightly slower than RAID 5) due to the additional overhead of updating two parity blocks for each write operation. In addition, read performance can also suffer when the volume is in degraded mode, that is, in case of a drive failure.
The capacity of a RAID 6 array is equal to the size of the smallest drive multiplied by the number of drives less the twice capacity of the smallest drive. RAID 6 requires minimum four drives.
RAID 10
RAID 10 is a combination of RAID 0 and RAID 1 where data is striped across multiple RAID 1 drive groups, as shown in the following figure. RAID 10 is also known as spanned mirroring.
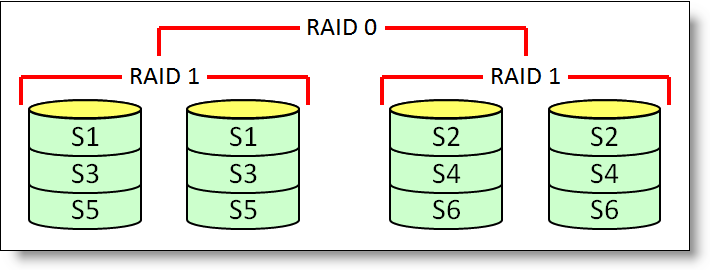
Figure 6. RAID 10
RAID 10 provides fault tolerance by sustaining a single drive failure within each span, and it offers very good performance with concurrent I/O processing on all drives. The capacity of a RAID 10 array is equal to a half of the total storage capacity. RAID 10 requires at least four drives.
RAID 50
RAID 50 is a combination of RAID 0 and RAID 5 where data is striped across multiple RAID 5 drive groups, as shown in the following figure. RAID 50 is also known as spanned striping with distributed parity.
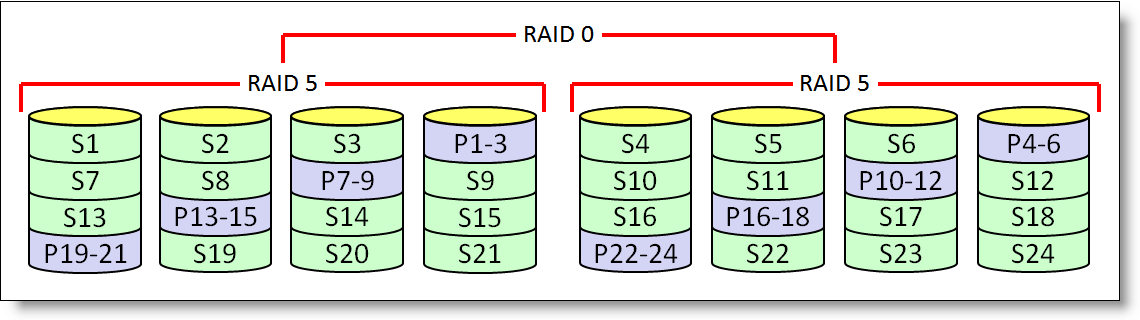
Figure 7. RAID 50
RAID 50 provides fault tolerance by sustaining a single drive failure within each span, and it offers excellent read performance. It also improves write performance compared to RAID 5 due to separate parity calculations in each span. The capacity of a RAID 50 array is equal to the size of the smallest drive multiplied by the number of drives less the capacity of the smallest drive multiplied by the number of spans. RAID 50 requires minimum six drives.
RAID 60
RAID 60 is a combination of RAID 0 and RAID 6 where data is striped across multiple RAID 6 drive groups, as shown in the following figure. RAID 60 is also known as spanned striping with dual distributed parity.
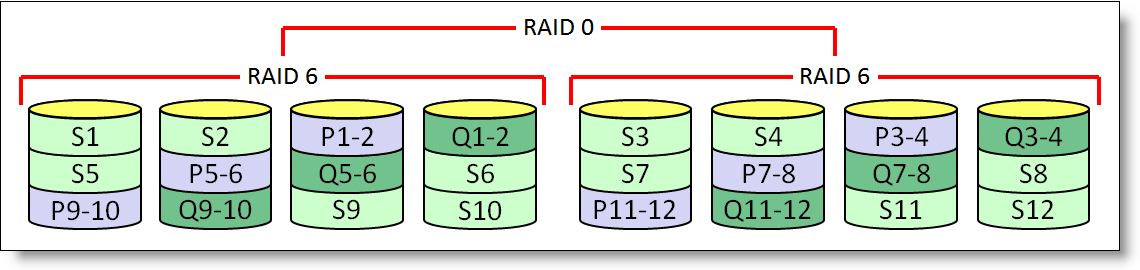
Figure 8. RAID 60
RAID 60 provides best fault tolerance by sustaining two simultaneous drive failures within each span, and it offers excellent read performance. It also improves write performance compared to RAID 6 due to separate parity calculations in each span.
The total capacity of a RAID 60 array is equal to the size of the smallest drive multiplied by the number of drives less the capacity of the smallest drive multiplied by twice the number of spans. RAID 60 requires minimum eight drives.
RAID 1 Triple
RAID 1 Triple is similar to RAID 1, but creates fault tolerance by maintaining redundant copies of data using three disk drives, rather than two. All three drives contain mirrored duplicated user data. If a drive fails, the remaining drives provide backup copies of the files and normal system operations are not interrupted.
RAID 10 Triple
RAID 10 Triple is similar to RAID 10, but creates fault tolerance by maintaining redundant copies of data using at least six disk drives. Data is striped across two or more sets of RAID 1 (Triple) drives for rapid access. If a drive fails, the remaining drives provide backup copies of the files and normal system operations are not interrupted.
Hot Spares
Hot Spares are designated drives that automatically and transparently take the place of a failed drive in the fault tolerant RAID arrays. This helps minimize the amount of time when the array remains in the degraded mode after the drive failure by automatically starting the rebuild process to restore the data from the failed drive on the hot spare.
Hot spare drives can be global or dedicated. A global hot spare drive can be used to replace the failed drive in any fault tolerant drive group as long as its capacity is equal or larger than the capacity of the failed drive used by the RAID array. A dedicated hot spare can only replace the failed drive in the designated drive group.
RAID level comparison
The selection of a RAID level is driven by the following factors:
- Read performance
- Write performance
- Fault tolerance
- Degraded array performance (for fault tolerant RAID levels)
- Effective storage capacity
The following table summarizes the RAID levels and their characteristics to assist you with selecting the most appropriate RAID level for your needs.
† Some implementations of RAID-0 allow only 1 drive, however this is not strictly RAID.
* The maximum number of drives in a RAID array is controller and system dependent.
** Up to 8 spans with 2 drives in each span.
*** Up to eight 24-drive external expansion enclosures; up to 8 spans with up to 32 drives in each span (the number of drives in the span should be the same across all spans).
Notes:
- The terms Excellent, Very good, Good, and Satisfactory are relative performance indicators for comparison purposes and do not represent any absolute values: Excellent is better than Very good, Very good is better than Good, and Good is better than Satisfactory.
- The terms Fast and Slow are relative rebuild time indicators for comparison purposes and do not represent any absolute values: Fast is faster than Slow.
- Degraded array performance means the performance of a RAID array with a failed drive or drives.
The following table summarizes benefits and drawbacks of each RAID level.
The following figure might help you select a RAID level based on your data storage requirements.
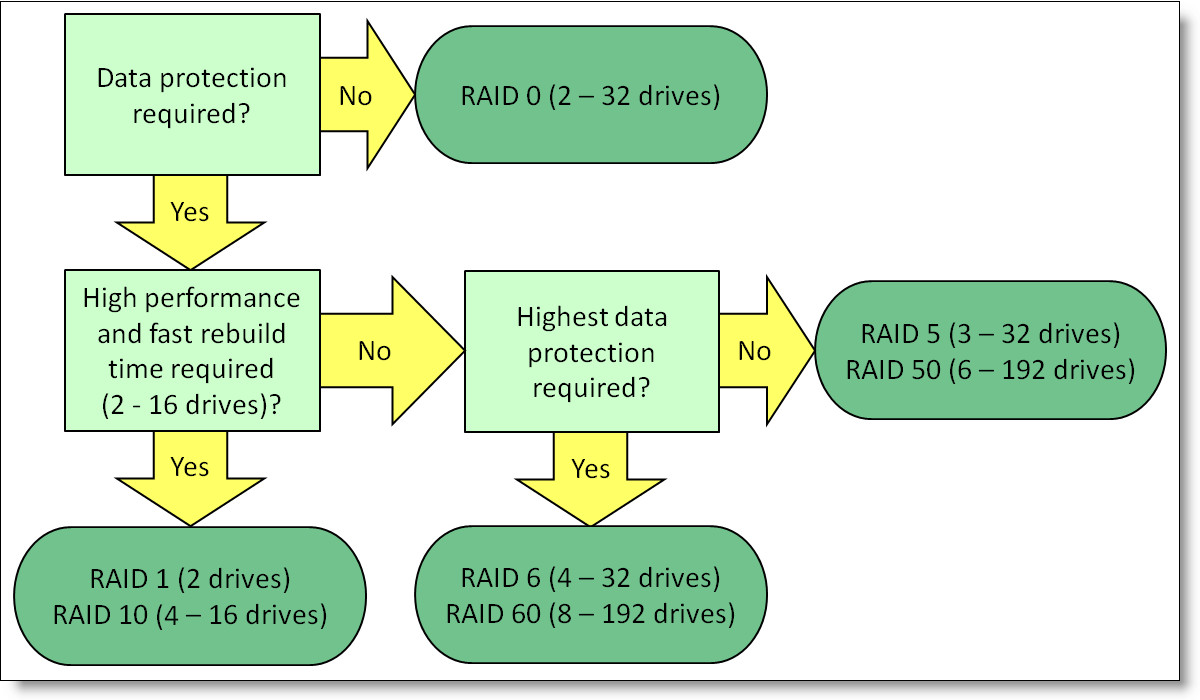
Figure 9. RAID selection guidance
Related publications and links
For more information, refer to the following publications:
- Lenovo ThinkSystem RAID Adapter and HBA Reference
https://lenovopress.com/lp1288 - Lenovo RAID Management Tools and Resources
http://lenovopress.com/lp0579
Trademarks
Lenovo and the Lenovo logo are trademarks or registered trademarks of Lenovo in the United States, other countries, or both. A current list of Lenovo trademarks is available on the Web at https://www.lenovo.com/us/en/legal/copytrade/.
The following terms are trademarks of Lenovo in the United States, other countries, or both:
Lenovo®
System x®
ThinkServer®
ThinkSystem®
Other company, product, or service names may be trademarks or service marks of others.
Configure and Buy
Please select a locale
Full Change History
First published: December 15, 2016
Course Detail
Employees Only Content
The content in this document with a is only visible to employees who are logged in. Logon using your Lenovo ITcode and password via Lenovo single-signon (SSO).
The author of the document has determined that this content is classified as Lenovo Internal and should not be normally be made available to people who are not employees or contractors. This includes partners, customers, and competitors. The reasons may vary and you should reach out to the authors of the document for clarification, if needed. Be cautious about sharing this content with others as it may contain sensitive information.
Any visitor to the Lenovo Press web site who is not logged on will not be able to see this employee-only content. This content is excluded from search engine indexes and will not appear in any search results.
For all users, including logged-in employees, this employee-only content does not appear in the PDF version of this document.
This functionality is cookie based. The web site will normally remember your login state between browser sessions, however, if you clear cookies at the end of a session or work in an Incognito/Private browser window, then you will need to log in each time.
If you have any questions about this feature of the Lenovo Press web, please email David Watts at dwatts@lenovo.com.





